PFG – Journal of Photogrammetry, Remote Sensing and Geoinformation Science
Efficient 3D Mapping and Modelling of Indoor Scenes with the Microsoft HoloLens: A Survey
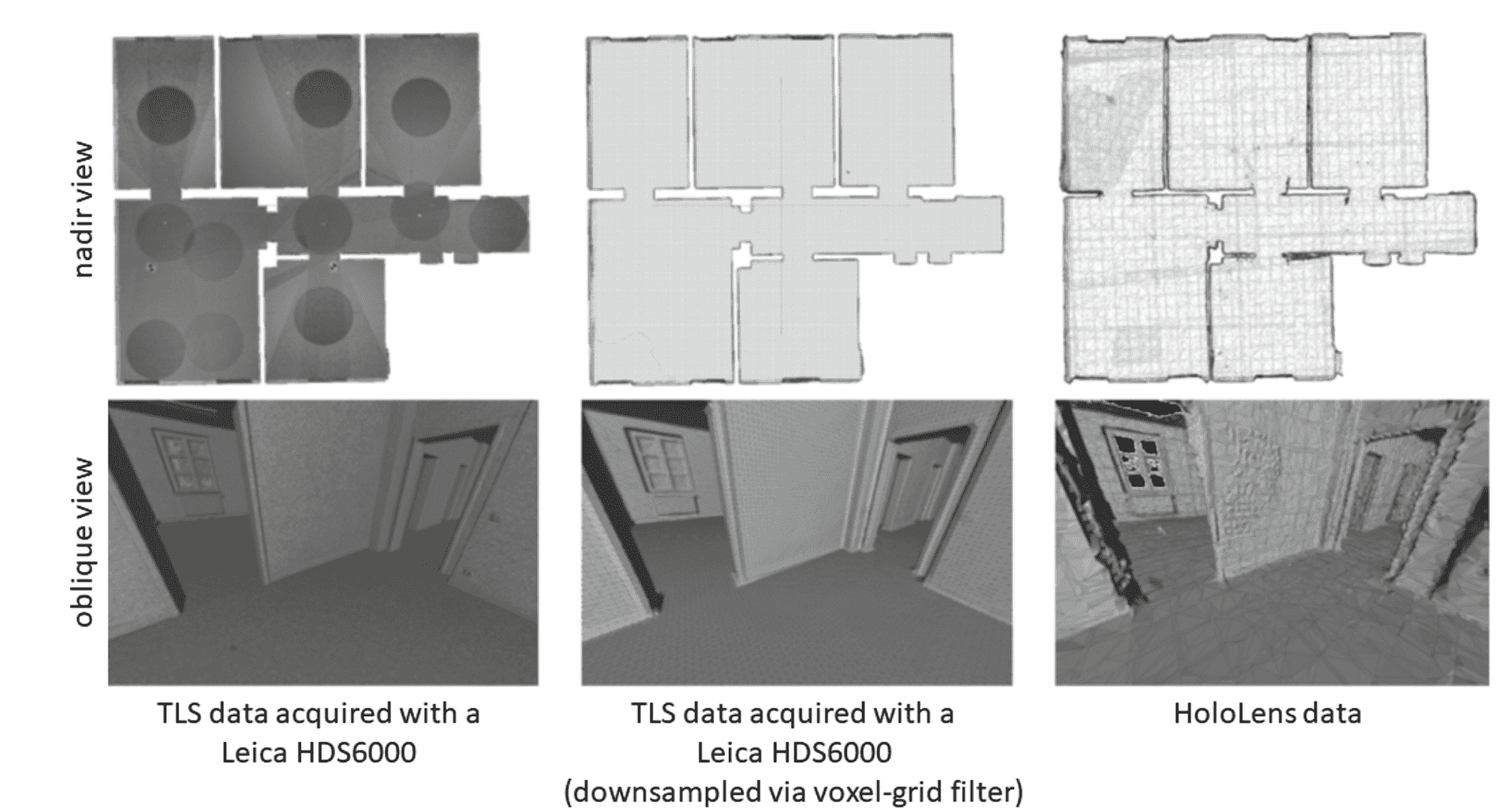
The Microsoft HoloLens is a head-worn mobile augmented reality device. It allows a real-time 3D mapping of its direct environment and a self-localisation within the acquired 3D data. Both aspects are essential for robustly augmenting the local environment around the user with virtual contents and for the robust interaction of the user with virtual objects. Although not primarily designed as an indoor mapping device, the Microsoft HoloLens has a high potential for an efficient and comfortable mapping of both room-scale and building-scale indoor environments. In this paper, we provide a survey on the capabilities of the Microsoft HoloLens (Version 1) for the efficient 3D mapping and modelling of indoor scenes. More specifically, we focus on its capabilities regarding the localisation (in terms of pose estimation) within indoor environments and the spatial mapping of indoor environments. While the Microsoft HoloLens can certainly not compete in providing highly accurate 3D data like laser scanners, we demonstrate that the acquired data provides sufficient accuracy for a subsequent standard rule-based reconstruction of a semantically enriched and topologically correct model of an indoor scene from the acquired data. Furthermore, we provide a discussion with respect to the robustness of standard handcrafted geometric features extracted from data acquired with the Microsoft HoloLens and typically used for a subsequent learning-based semantic segmentation.
More Information
Citation
BibTex
@article{bib:weinmann:2021,
author = { Weinmann, Martin and Wursthorn, Sven and Weinmann, Michael and Hübner, Patrick },
title = { Efficient 3D Mapping and Modelling of Indoor Scenes with the Microsoft HoloLens: A Survey },
journal = { PFG – Journal of Photogrammetry, Remote Sensing and Geoinformation Science },
volume = { 89 },
year = { 2021 },
pages = { 319--333 },
doi = { 10.1007/s41064-021-00163-y },
url = { https://publications.graphics.tudelft.nl/papers/343 },
}