2012
International Journal of Computer Assisted Radiology and Surgery,
2012
IEEE Transactions on Visualization and Computer Graphics,
2012
International Journal of Computer Assisted Radiology and Surgery,
2012
In Proceedings of PCG Workshop,
2012
In Proceedings of Visual Computing in Biology and Medicine,
2012


IEEE Transactions on Visualization and Computer Graphics,
2012
In Proceedings of IVA,
2012
Computer Graphics Forum,
2012
In Proceedings of Eurographics Workshop on Visual Computing for Biology and Medicine Poster,
2012
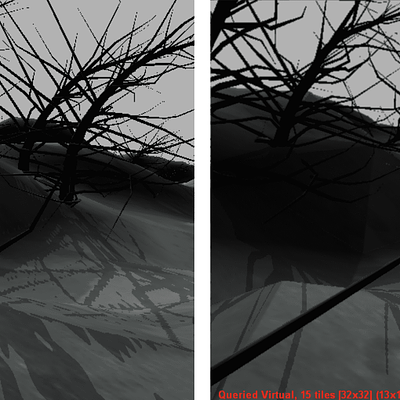
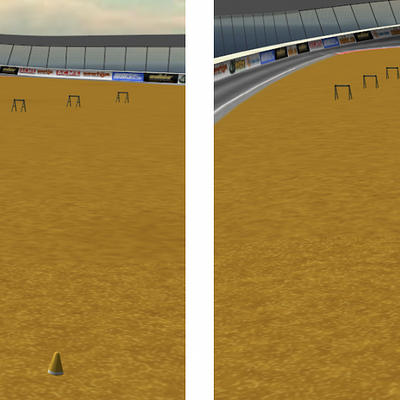
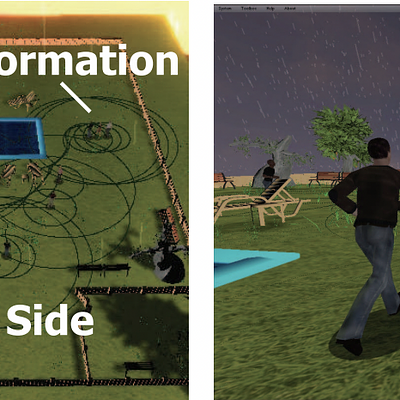
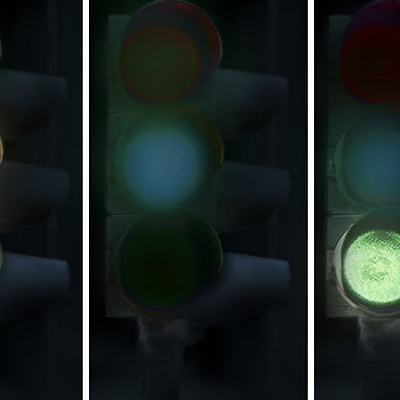
![Real-time rendering applications exhibit a considerable amount of spatio-temporal coherence. This is true for camera motion, as in the Parthenon sequence (left), as well as animated scenes such as the Heroine (middle) and Ninja (right) sequences. Diagrams to the right of each rendering show disoccluded points in red, in contrast to points that were visible in the previous frame, which are shown in green (i.e. green points are available for reuse). [Images courtesy of Advanced Micro Devices, Inc., Sunnyvale, California, USA]](https://publications.graphics.tudelft.nl/rails/active_storage/representations/redirect/eyJfcmFpbHMiOnsibWVzc2FnZSI6IkJBaHBBdVFJIiwiZXhwIjpudWxsLCJwdXIiOiJibG9iX2lkIn19--7e1125f607030dc5d6de0c68836a681f5432efb9/eyJfcmFpbHMiOnsibWVzc2FnZSI6IkJBaDdCem9MWm05eWJXRjBTU0lJY0c1bkJqb0dSVlE2RTNKbGMybDZaVjkwYjE5bWFXeHNXd2RwQXBBQmFRS1FBUT09IiwiZXhwIjpudWxsLCJwdXIiOiJ2YXJpYXRpb24ifX0=--8786188a9503cffd21c59bbcd5519930c73c621f/greenmotion-teaser.png)
Bulletin of the American Meteorological Society (BAMS),
2012

Epilepsie : Periodiek voor Professionals,
2012