2016

Computer Graphics Forum,
2016
In Proceedings of Visual Computing in Biology and Medicine,
2016
Computer Graphics Forum,
2016
Computer Graphics Forum,
2016
In Proceedings of Vision, Modeling, and Visualization,
2016

Computer Graphics Forum,
2016
2015


In Proceedings of High Performance Graphics,
2015
In Proceedings of ACM Multimedia,
2015
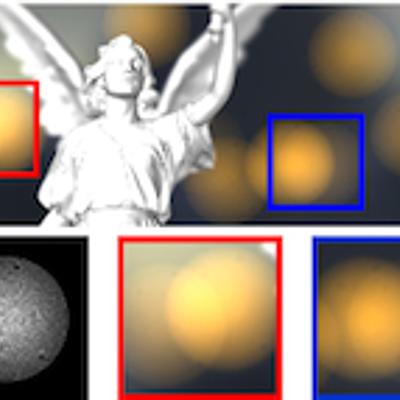
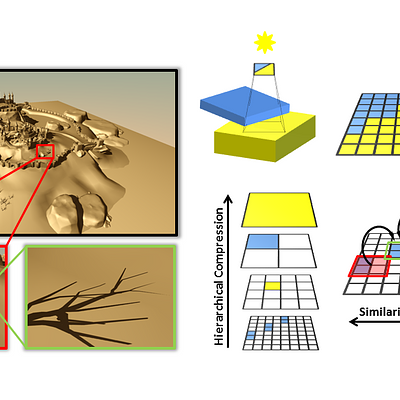
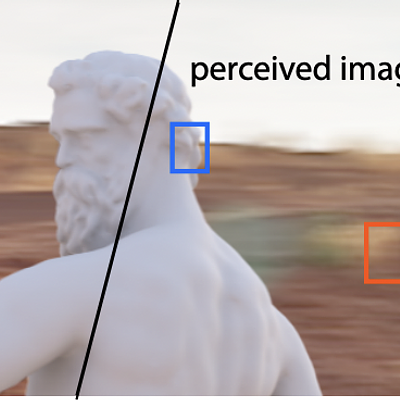
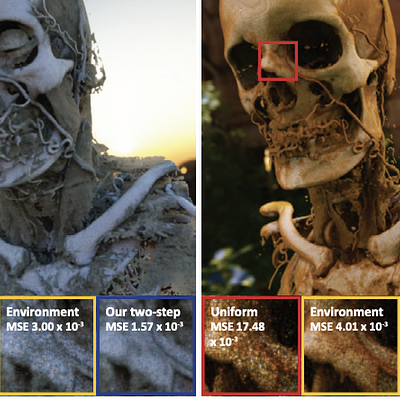
![A complex scene with fine details and global illumination. Left: Images rendered with PBRT [PH10] using 32 samples per pixel rendered in 2.5 minutes. Middle: Image reconstructed by our algorithm in 2.6 minutes including rendering and filtering. Right: Equal error image with 200 samples per pixel rendered in 12.7 minutes.](https://publications.graphics.tudelft.nl/rails/active_storage/representations/redirect/eyJfcmFpbHMiOnsibWVzc2FnZSI6IkJBaHBBczBIIiwiZXhwIjpudWxsLCJwdXIiOiJibG9iX2lkIn19--f3a5f529ef45f02ae2011bf4414f7429114778cc/eyJfcmFpbHMiOnsibWVzc2FnZSI6IkJBaDdCem9MWm05eWJXRjBTU0lJY0c1bkJqb0dSVlE2RTNKbGMybDZaVjkwYjE5bWFXeHNXd2RwQXBBQmFRS1FBUT09IiwiZXhwIjpudWxsLCJwdXIiOiJ2YXJpYXRpb24ifX0=--8786188a9503cffd21c59bbcd5519930c73c621f/bee2015-teaser.png)
Computer Graphics Forum,
2015
International Journal of Computer Assisted Radiology and Surgery,
2015
In Proceedings of Graphics Interface,
2015
IEEE Transactions on Visualization and Computer Graphics,
2015
In Proceedings of Graphics Interface,
2015
In Proceedings of DATA ANALYTICS 2015, The Fourth International Conference on Data Analytics,
2015